
日本山形大学的研究人员已经开发出了全3D打印执行器,该执行器可以构成类似水母的软机器人的基础。使用基于紫外线的3D打印机,该团队能够将新合成的粒子双网络(P-DN)水凝胶固化成一种与月水母的肌肉相似的收缩机制。基于他们新颖的设备,科学家们现在打算创建一个具有潜在海洋野生动植物监测应用的整个水生机器人。

一群月亮水母。科学家发现他们的致动器以类似于月水母的肌肉的方式收缩。图片来自Kiara Sztankovics,Unsplash。
水生机器人的生态效益
开发能够模仿其有机对应物行为的软机器人的好处不仅仅在于新颖性价值。先进的设备具有与人类一起工作,进入灾难管理,海洋保护甚至医疗保健应用中我们无法做到的地方的潜力。这种机器人在水下具有特殊的前景,在那里他们可以收集有关海洋的更多信息,并有助于进一步实现联合国的可持续发展目标(SDG)。达到此目的的最佳方法之一是创建模仿天然动物运动的柔软材料,但到目前为止,即使是3D打印的章鱼风格机器人都具有金属体,有可能使它们对海洋生物造成破坏。
尽管许多现有的漫游器都由硅橡胶制成的“腿”作为动力,但水凝胶却是一种侵入性较小的替代方案,因为它们已经由大约90%的水组成。这种成分也与在水母中自然看到的成分相似,与其他水生生物相比,其操作所需的能量要少得多,有可能使它们成为海洋友好型监视机器人的理想基础。
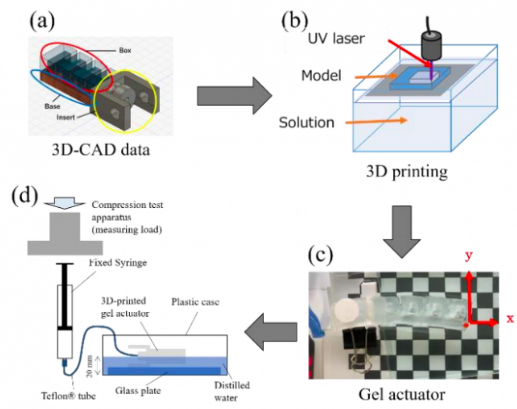
日本科学家使用UV 3D打印机制造了五个凝胶致动器原型。图片来自ECS固态科学与技术杂志。
构造新型执行器
在Yamagata团队开始3D打印其执行器之前,他们合成了一种新型的交联P-DN水凝胶,该凝胶由硬而脆的第一聚合物和较软的第二层组成。该材料的特点是高含水率,增强的强度和出色的可印刷性,为它们的装置形成了坚实而易延展的基础。
准备好配方后,科学家们使用基于UV的3D打印机将其聚合成三个独立的部分:连接器,底座和盒子。从理论上讲,“底座”和“盒子”设计为通过注入空气而变形,从而产生提供推进所需的收缩,而“连接器”仅将硅树脂管固定在执行器的主体上。为了进行测试,该小组3D打印了五个不同的原型,发现该凝胶的弹性与所用单体的类型紧密相关,并且达到了交联的水平。同样,执行器的生产宽度为0.4-0.5 mm,因为较厚的层会出现膨胀,从而导致零件不一致。
在压缩测试中,通过管道将空气注入执行机构,科学家发现他们能够通过调节其组成部件的弹性模量来控制其变形。该设备还显示出与扁圆月水母相同的收缩率,可能使其成为完整机器人复制品的理想基础。将来,研究人员认为,完善执行器壁厚与其轨迹之间的关系,将是开发改进的设备迭代的关键。目前,Yamagata团队打算将其执行器集成到一个新颖的以水母为灵感的机器人中,最终目的是在海洋保护应用中使用它。
受动物启发的软机器人
尽管用于环境监控的3D打印机器人是一项相当高尚的工作,但它绝不是一种新颖的机器人,并且最近还开发了几种类似的机器人。
佛罗里达大西洋大学(FAU)和美国海军研究办公室的科学家开发了3D打印的软机器人水母,能够监测脆弱的珊瑚礁。该设备由八个液压执行器组成,这些执行器经过专门设计,不会损坏脆弱的生物生态系统。
同样,哈佛大学的一个团队创造了“ Octobot” 3D打印自主软件机器人。像Yamagata团队的执行器一样,Octobot是基于气动的,但是它不使用氧气而是将少量的液体燃料转化为气体,从而像气球一样使手臂膨胀。
软机器人也具有重要的陆上监视应用程序,佐治亚理工学院的工程师已经创建了3D打印的“ Slothbot”,用于在亚特兰大植物园照顾野生动物。 该设备沿着树木之间的电缆移动,以观察下面生境的温度,天气和二氧化碳水平。
来源:中国3D打印网
如有侵权,请及时联系删除!

 13206432890
13206432890 高经理
高经理


